先日、ゲットナビウェブでも紹介した月面ロボット探査を競う「Google LINAR XPRIZE」を覚えていますでしょうか。初耳の方はまず、こちらの記事をご覧ください。
関連記事
有村架純や宇宙兄弟が応援! auとHAKUTOが人類初の月面探査レースに挑戦中
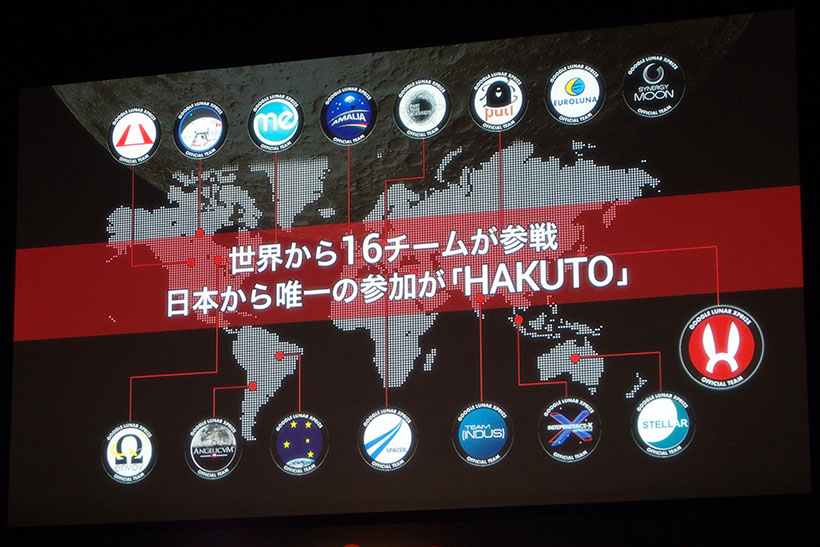
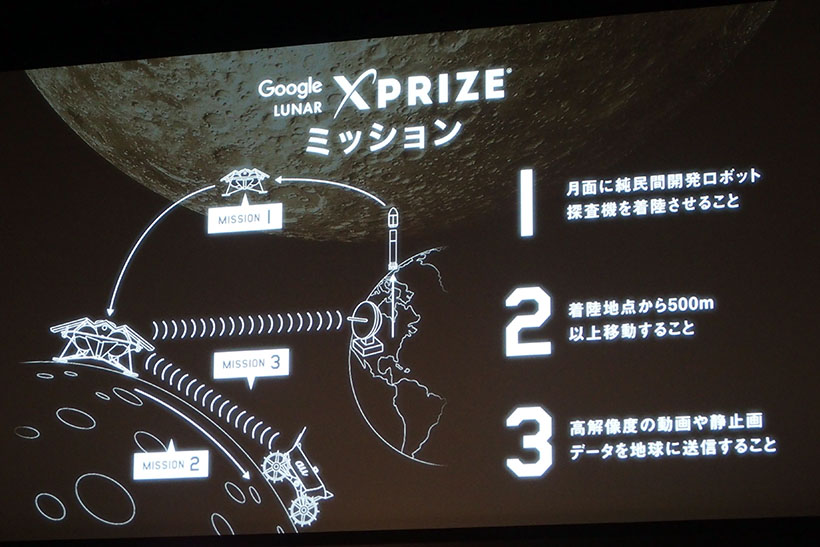
Google LUNAR XPRIZEは、民間組織による月面探査プロジェクトです。月面に民間で制作された無人探査機を着陸させ、着地点から500m以上走行し、動画や静止画のデータを地球に送るのが目的です。世界から16チームが参加し、日本では唯一HAKUTOが参加しています。
改良を重ね軽量化に成功
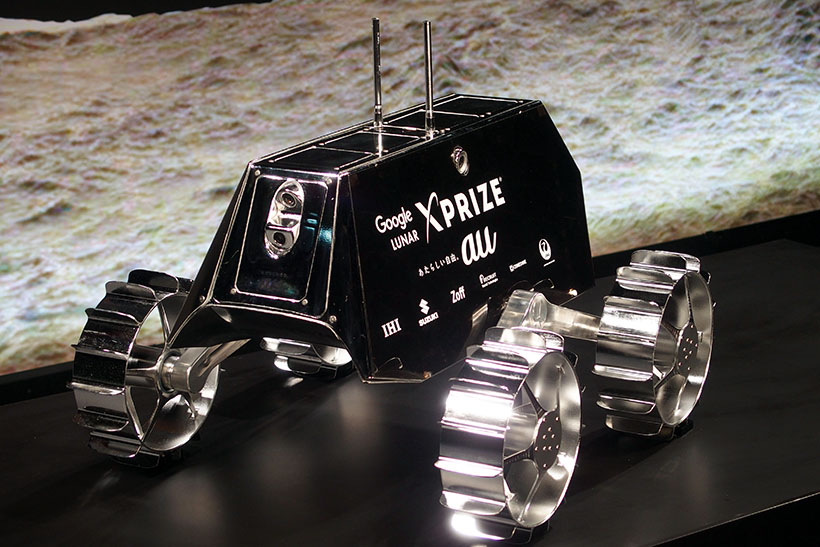
今回、そのHAKUTOが使用する無人探査機ローバーフライトモデルのデザインが完成し、お披露目となりました。
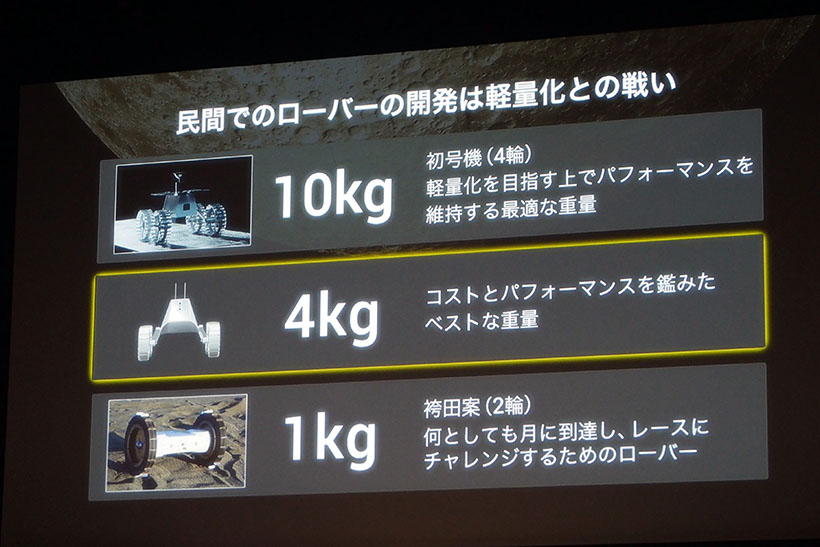
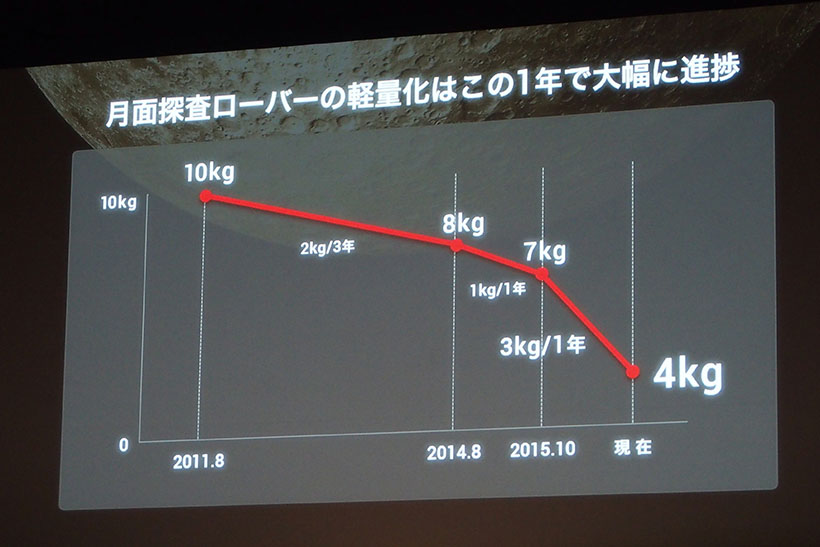
HAKUTOは、打ち上げパートナーが撤退する事態に陥ったため、数十億円かけて自力で打ち上げをするか、ほかのチームに相乗りするか、諦めるかの選択を迫られたとのこと。結果的に、相乗りを選んだのですが、それでも打ち上げるモノの重量が1kg増えるごとに120万ドル(約1億2000万円)ずつ費用が増えるため、金銭面からもローバーの軽量化が必須になりました。その努力の結果、HAKUTOのローバーはなんと総重量4kgを実現。アメリカが火星探査ミッションで用いているローバーの重量が900kgと軽自動車並なことを考えると、いかに軽量なのかがわかります。

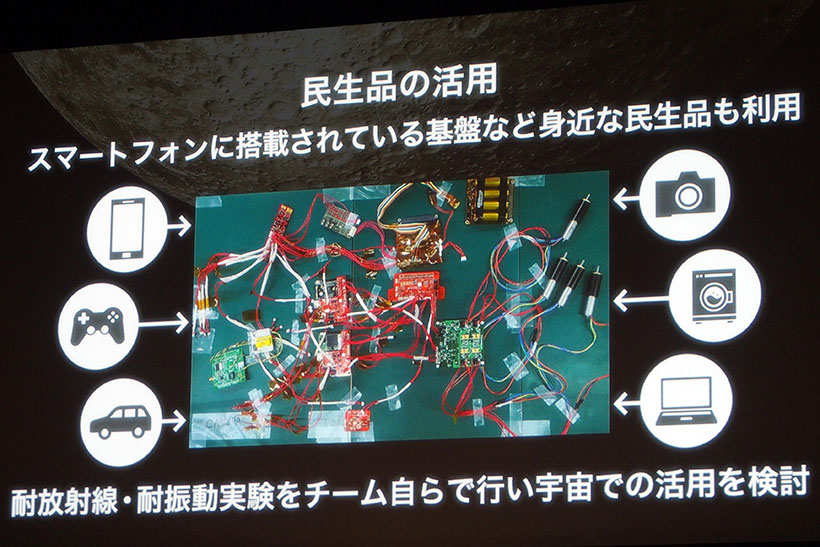
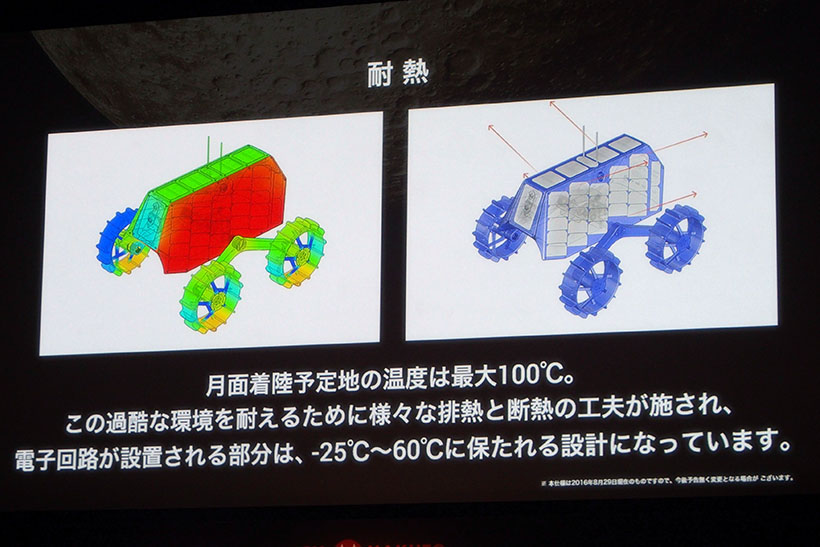
さらに、すべてを新たに開発するのではなく、すでに民生品として使用している部品を使うことで、大幅なコストダウンも実現しています。もちろん、小型化することで、脆弱なボディになってしまっては元も子もありません。ロケット打ち上げの激しい振動に耐えられるように、耐振動性能は14Gを確保。-40~100度の月面の厳しい温度環境にも十分耐えられるようになっております。
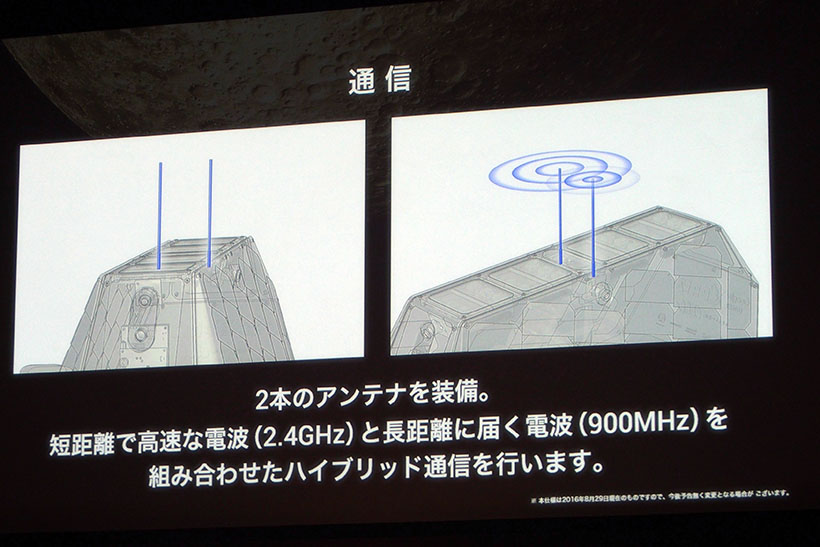
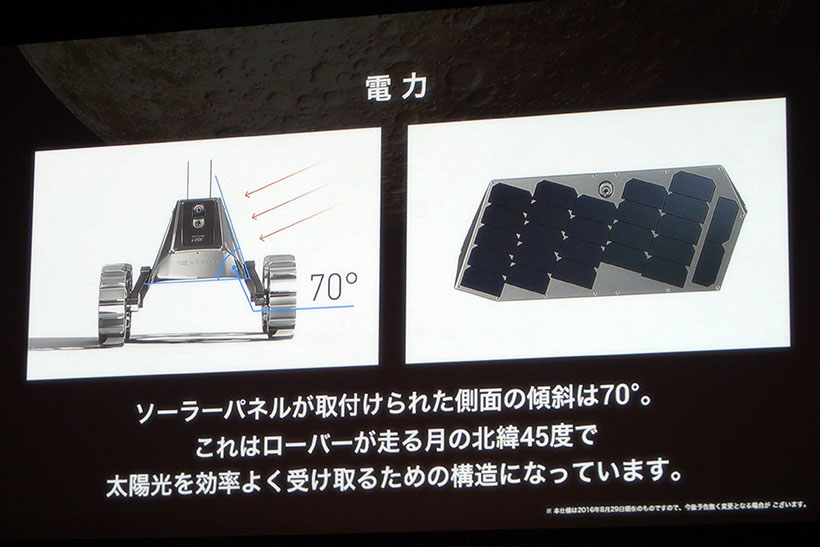
ローバーを操作するにも、撮影したデータを送るにも必要な通信も2.4GHz帯と900MHz帯のふたつのアンテナを用意。車体を70度に傾斜させることで、太陽光を効率的に受け取って、ソーラー発電ができるようになっています。
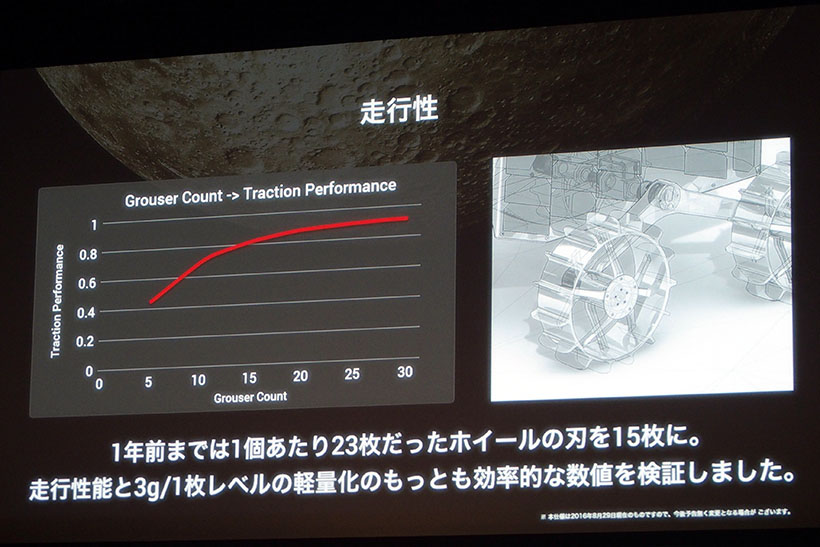
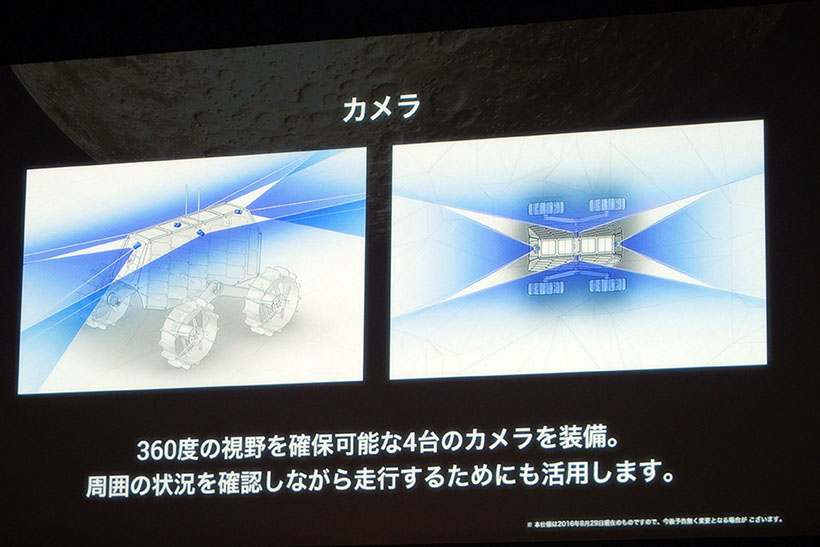
車輪のホイールの刃は以前の23枚から15枚に変更。軽量化をはかると共に、走行性を維持する枚数を検証した結果の枚数です。カメラは前後左右の4か所に設置し、360度の視界を実現。他のチームではカメラが可動することで360度の視界を実現したところもありますが、コストや故障の心配からもっとも安定したカメラ配置を実現しています。
アンバサダーに新たに神田沙也加さんが加わる
今後は9月26日~10月1日に鳥取砂丘にてフィールド走行試験を実施し、12月末から来年の1月にかけてローバーフライトモデルの製造が完成する予定とのことです。発表会には、前回も登場したアンバサダーであり宙(そら)ガールでもある篠原ともえさんと、今回からアンバサダーに加わった神田沙也加さんも登壇。さらに前回、応援ソングを作成することを発表したサカナクションの山口一郎氏も登場しました。神田沙也加さんは実際に試作機のローバーを操縦し、山口さんは「au×HAKUTO MOON CHALLENGE」の新CM「僕らはみんな宇宙兄弟だ。」篇の制作秘話などを話してくれました。


さらに、パートナー企業として、Zoffの上野会長兼社長、日本航空の植木社長、リクルートテクノロジーズの米谷CTO、スズキの斎藤事業本部長、セメダインの岩切社長なども登壇し、ローバーフライトモデルのデザイン完成を祝っていました。
民間のみで月面探査機の打ち上げと月面探査を行うというのは、まさにマンガ「下町ロケット」の世界のようです。来年の吉日に打ち上げとなるHAKUTOのローバーと「au×HAKUTO MOON CHALLENGE」プロジェクトから、今後も目が離せそうにありません!