日産自動車は、2020年以降の実用化を目指した最新の自動運転実験車両での公道テストを開始し、その体験走行会をメディア関係者向けに実施した。実験車両はインフィニティQ50(日本名:スカイライン)をベースとし、そこに新世代のProPILOT技術を搭載。目的地をナビゲーションで設定するだけで、一般道と高速道を含む公道上を自動運転走行できる。

高度なセンサー類がてんこ盛り
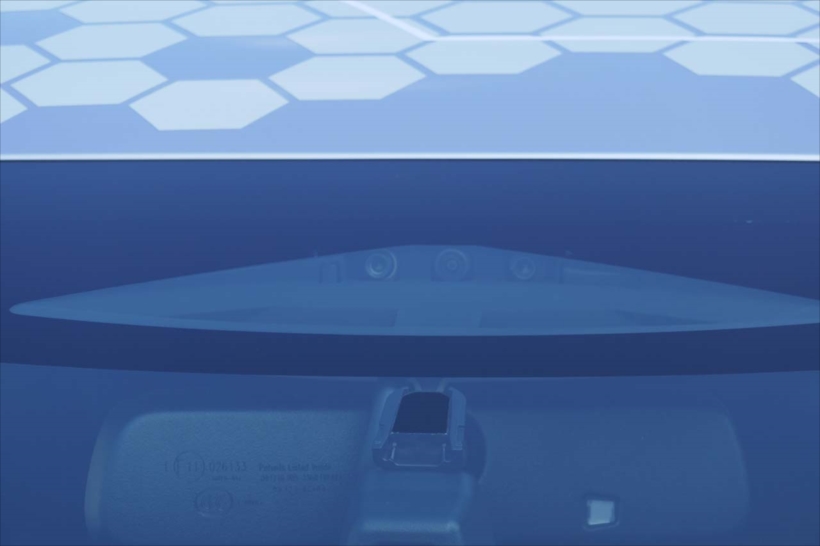
車両には数多くのセンサーが搭載されていた。カメラはMobileyeの画像処理技術を使ったものをフロントウインドウ内に3個、左右のドアミラーに2個、ルーフ上に4個など計12個を搭載。超音波センサーは12個、レーザースキャナーを計6個、ミリ波レーダーを9個搭載している。また、超高精度な測位を可能にするRTK-GNSS(高精度GPSのこと)と高精度HDマップを組み合わせている。



同乗した日産自動車の電子技術・システム技術開発本部/AD&ADAS先行技術開発部 戦略企画グループ部長の飯島徹也氏は「システムはかなり高価となり、市販車にはとても搭載できない」と話すが、現時点で手に入るセンサーで実現できる自動運転にトライしたのが、この実験車両というわけだ。

【動画】あまりに自然な高速道路への合流に驚愕
体験走行会で用意されたのは、東京都江東区市場前付近の一般道を起点に、湾岸線有明ランプから首都高速に入り、中央環状線(C2)の船堀橋ランプから退出して再び戻る、合計で約24kmのルート。車両には計4名が乗車して体験走行が実施された。スタートはステアリングに用意された「ProPILOT」のスイッチを押すだけ。あとはステアリング操作を含め、ブレーキやアクセル操作のすべてを人の介在なしで走行する。

走り出してすぐに感じたのは、車線内のトレースにしても、加減速にしても、その動きにまったく違和感がないということ。なかでも驚いたのは高速道路への合流だ。側道でしっかり加速して本線へと向かい、車両が過ぎ去ったのを見計らって後ろにスッと入る。システムがこれを実行しているとは思えない巧みさだ。実際の走行の様子は次の動画をご覧いただきたい。
高速道路での合流や車線移動は、これまで速度差を合わせてクルマが自動で合流するのは技術的にもかなり難しいとされてきたはずだが、今回の実験車両はそれをいとも簡単にやってのけた。飯島氏はその点について「やっていることは人間と同じ。合流時にターゲットとするクルマを見つけ、車速を合わせてその後ろに入る。後続車が続いて入れそうになかったら、さらにそのクルマの後ろに入るようAIが判断を瞬時に行っている」と話す。
車線移動は設定した車速と道路状況を判断して自動的に行い、その際は「左車線に移動します」とアナウンス。このため、勝手に動いているような不安も感じなかった。分岐点や渋滞での動きも難なくこなし、あっという間に中継地点に設定した首都高C2船堀橋ランプに到着。ここで信号が変わったあとにUターン。ここでもシステムがすべてコントロールし、ドライバーは座っているだけだった。
一般道での走行はどうか。車線移動は高速道と同じように、周囲の状況を捉えながら走行。交差点での車線も正確にトレースし、左折での人の存在もきちんと判断して制御している様子だった。飯島氏によれば「ここまで安定した走りができる最大の理由は、HDマップの搭載」とのこと。HDマップにはクルマが走行するべきルートが埋め込まれており、「これに従えばクルマは一切迷わない走りができる」(飯島氏)というわけだ。
今回の実験車両の自動運転レベルについて飯島氏に伺うと「どのレベルなのかはコミュニティが決めること。こちらからレベル○とか言うものではないと思う。それでも強いて言えば、(SAEの)レベル2でもかなり高度な部類に入る」(飯島氏)と話す。
もちろん、解決すべき課題も散見された。その1つが一般道交差点での右折。対向車がいる状態での右折は、矢印の信号でもない限り基本的に難しいという。飯島氏は「交差点での右折を安心してできるためには、車両だけの制御では限界がある。(路車間通信ができる)インフラの整備は絶対に必要だ」と話す。

今回の体験試乗を通して感じたのは、この実験車両は間違いなく自動運転のトップに位置する制御を行っていたということ。あくまでセンサー類をてんこ盛りにした状態ではあるが、少なくとも筆者がいままで試乗してきた実験車両のどれよりも秀でた制御を行っていたのは確か。自動運転という夢が現実になる日がさらに一歩近づいたことを実感した次第である。